Simba reRobhoti Rinoshanda Nemaindasitiri 6 Aixs
Simba reRobhoti Rinoshanda Nemaindasitiri 6 Aixs
Chikamu Chikuru
Ruoko rwerobhoti remuindasitiri / Ruoko rwerobhoti rinoshanda pamwe chete / Chigadziko chemagetsi / Actuator yakangwara / Mhinduro dzeAutomation
Kushandiswa
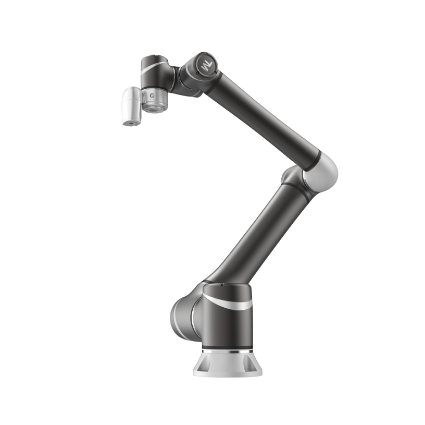
Iyo TM12 ndiyo ine nzvimbo yakareba kupfuura dzose mumarobhoti edu, ichigonesa kushanda pamwe chete, kunyangwe mumashandisirwo anoda kugona kurongeka uye kusimudza zvinhu padanho remaindasitiri. Ine zvinhu zvakawanda zvinoibvumira kushandiswa zvakachengeteka pedyo nevashandi vevanhu, uye pasina chikonzero chekuisa zvipingamupinyi zvakakura kana fenzi. TM12 isarudzo yakanaka kwazvo ye cobot automation yekuvandudza kuchinjika, uye kuwedzerakubereka.
Nehurongwa hwekuona hunotungamira mukirasi, tekinoroji yepamusoro yeAI, kuchengetedzeka kwakazara, uye kushanda kuri nyore,AI Cobot ichaendesa bhizinesi rako kure kupfuura kare.Simudzira otomatiki padanho rinotevera nekuwedzera kugona, kuvandudza mhando, uye kuderedza mitengo.
Tichiunza hunyanzvi hwedu hutsva mumunda wekushanda kwemaindasitiri otomatiki - Industrial Grinding and Polishing Robot Arm Mechanical 6-Axis Robot Arm. Yakagadzirwa kuti ishandure mabasa ekukuya nekupukuta mumaindasitiri ese, ruoko urwu rwepamusoro rwerobhoti rune hungwaru, kushanda zvakanaka uye kushanduka-shanduka.
Ruoko rwedu rwerobhoti rune mafambiro matanhatu, zvichitevedzera kuchinjika uye kugona kweruoko rwemunhu, zvichirubvumira kuita mabasa akaomarara ekukuya nekupukuta zviri nyore. Kugona uku kunofamba kunoita kuti nzvimbo yega yega ibatiswe zvakaenzana, zvichikonzera kupera kwakanaka uye kunaka.
Chimwe chezvinhu zvinonyanya kukosha pamaoko edu erobhoti ekukuya nekupukuta muindasitiri isimba rawo rakanaka kwazvo remuchina. Akagadzirwa kuti agare kwenguva refu muindasitiri, ruoko urwu rwerobhoti runogona kutakura zvinhu zvinorema uye kutsungirira mamiriro ekushanda akaomarara. Chimiro charo chakasimba chinovimbisa kugadzikana panguva yekushanda, zvichideredza kudedera kunogona kukanganisa kururama kwebasa.
Ruoko urwu rwerobhoti haruna simba chete, asi kumhanya kwarwo uye kururama kwarwo zvinoshamisawo. Rwakashongedzerwa nemaalgorithms epamusoro ekudzora kufamba, runogona kushanda nekukurumidza pasina kukanganisa kururama. Izvi zvinoita kuti mabasa ekukuya nekupukuta apedzwe nekukurumidza, zvichiwedzera zvakanyanya kugona kwekugadzira.
Kuti zviwedzere kushandiswa kwaro uye kuchinjika, maoko edu erobhoti anogona kurongwa zviri nyore uye kugadziriswazve kuti aite matekiniki akasiyana-siyana ekukuya nekupukuta. Ingava kukuya mipendero yakapinza, kupukuta nzvimbo dzakapfava, kana kupukuta mapatani akaomarara, ruoko urwu rwerobhoti runogona kuita zvese.
Maoko edu erobhoti anokuya nekupukuta eindasitiri anopawo kubatana kwakanaka nemamwe masisitimu eotomatiki nemichina. Izvi zvinoita kuti basa rifambe zvakanaka, zvinobvisa zvipingamupinyi uye zvinoita kuti basa ribudirire.
Pamusoro pezvo, mitengo yedu inokwikwidzana inoita kuti mabhizinesi ese ehukuru akwanise kubatsirwa nehunyanzvi uhwu hwemazuva ano pasina kushandisa mari yakawanda. Tinotenda kuti otomatiki inofanirwa kuwanikwa nemunhu wese, uye zvigadzirwa zvedu zvinoratidza kuzvipira uku kuti zvinhu zvikwanisike kutenga.
Muchidimbu, Industrial Grinding and Polishing Robot Arm Mechanical 6-Axis Robot Arm inoshandura zvinhu zvakanyanya munyaya yekushanda kwemaindasitiri. Nesimba rayo repamusoro rekugadzira michina, kumhanya, kunyatsoita zvinhu zvakasiyana-siyana, uye mutengo unokwikwidzana, ruoko urwu rwemarobhoti ruchashandura mashandiro ekukuya nekupukuta mumaindasitiri ese. Gamuchira ramangwana rekushanda kwemaindasitiri uye unzwe mazinga matsva ekubudirira uye kuenderana nezvigadzirwa zvedu zvitsva.
Zvinhu zvirimo
NGWARUKA
Cobot yako inodzivirira ramangwana neAI
• Kuongorora kwemaziso otomatiki (AOI)
• Kuvimbisa mhando uye kugara kwenguva dzose
• Kuwedzera kushanda zvakanaka kwekugadzira
• Deredza mari yekushandisa
ZVIRI NYORE
Hapana ruzivo runodiwa
• Graphical interface yekuronga mapurogiramu zviri nyore
• Mafambiro ekugadzirisa akatarisana nemaitiro
• Kutungamira nemaoko kuri nyore pakudzidzisa mabasa
• Kugadzirisa zvinoonekwa nekukurumidza nebhodhi rekugadzirisa
YAKACHENGETEDZWA
Kuchengetedzwa pamwe chete ndiko kwatinonyanya kukoshesa
• Inotevedzera ISO 10218-1:2011 & ISO/TS 15066:2016
• Kuonekwa kwegonyeti nekumira kwekukurumidzira
• Chengetedza mari nenzvimbo yekudzivirira zvipingamupinyi nefenzi
• Gadza miganho yekumhanya munzvimbo yebasa yekushandira pamwe chete
Makobhoti anoshandisa AI anoziva kuvapo uye kurongeka kwenzvimbo yavo nezvikamu zvavo kuti vaite mabasa ekuona nekutarisa zvinhu. Shandisa AI mumutsara wekugadzira pasina matambudziko uye kuwedzera kugona, kuderedza mari, uye kupfupisa nguva yekutenderera. Chiono cheAI chinogonawo kuverenga mhedzisiro kubva kumichina kana michina yekuedza uye kuita sarudzo dzakakodzera zvinoenderana.
Kunze kwekuvandudza maitiro ekugadzira otomatiki, kambani inoshanda neAI inogona kuteedzera, kuongorora, uye kubatanidza data panguva yekugadzira kudzivirira zvikanganiso uye kuvandudza mhando yechigadzirwa. Shandisa tekinoroji yako yeAI zviri nyore.
Marobhoti edu anoshanda pamwe chete ane sisitimu yekuona yakabatana, ichipa macobot kugona kuona nharaunda yawo izvo zvinovandudza zvakanyanya kugona kwecobot. Kuona kwemarobhoti kana kugona "kuona" uye kududzira data rekuona kuita mirairo ndeimwe yezvinhu zvinoita kuti tive vakanakisisa. Inoshandura mutambo pakuita mabasa nemazvo munzvimbo dzebasa dzinochinja-chinja, zvichiita kuti mashandiro afambe zvakanaka, uye maitiro e otomatiki ave nani.
Yakagadzirwa nepfungwa dzevashandisi vekutanga, ruzivo rwemapurogiramu harusi chinhu chinodiwa kuti utange neAI Cobot. Kufamba kwekushandisa mafambiro ekudzvanya nekudhonza uchishandisa software yedu yekuyerera kwepurogiramu kunoderedza kuoma. Tekinoroji yedu ine patent inobvumira vashandisi vasina ruzivo rwekunyora makodhi kuronga purojekiti kwemaminitsi mashanu.
Ma sensor ekuchengetedza anomisa AI Cobot kana yaonekwa kuti yabatwa, zvichideredza kukuvara kunogona kuitika panzvimbo isina kumanikidzwa uye yakachengeteka. Unogonawo kugadzirisa miganho yekumhanya kwerobhoti kuitira kuti ikwanise kushandiswa munzvimbo dzakasiyana-siyana dziri pedyo nevashandi vako.
Zvigadzirwa Zvakabatana



Chiratidzo cheSpecial
| Muenzaniso | TM12 | |
| Huremu | 32.8KG | |
| Mutoro Mukuru | 12KG | |
| Svika | 1300mm | |
| Nzvimbo dzeJoint | J1,J6 | ±270° |
| J2,J4,J5 | ±180° | |
| J3 | ±166° | |
| Kumhanya | J1,J2 | 120°/s |
| J3 | 180°/s | |
| J4 | 180°/s | |
| J5 | 180°/s | |
| J6 | 180°/s | |
| Kumhanya Kwakajairika | 1.3m/s | |
| Kumhanya Kwakanyanya | 4m/s | |
| Kudzokorora | ± 0.1mm | |
| Mwero werusununguko | Majoini matanhatu ekutenderera | |
| Ini/O | Bhokisi rekudzora | Kupinda kwedhijitari:16 Kubuda kwedhijitari: 16 Kupinda kweanalogi:2 Kubuda kweanalog:1 |
| Chishandiso Chinobatanidza. | Kupinda kwedhijitari: 4 Kubuda kwedhijitari: 4 Kupinda kweanalogi:1 Kubuda kweanalog:0 | |
| Simba reI/O | 24V 2.0A yebhokisi rekudzora uye 24V 1.5A yemudziyo | |
| Kupatsanurana kweIP | IP54 (Robot Arm); IP32 (Bhokisi Rekudzora) | |
| Kushandiswa kweSimba | Zvakajairika 300 watts | |
| Tembiricha | Robhoti inogona kushanda munzvimbo inodziya tembiricha iri pakati pe0-50℃ | |
| Kuchena | ISO Kirasi 3 | |
| Magetsi | 100-240 VAC, 50-60 Hz | |
| I/O Interface | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Kutaurirana | RS232, Ethemet, Modbus TCP/RTU (tenzi & muranda), PROFINET (Sarudzo), EtherNet/IP (Sarudzo) | |
| Nzvimbo Yekuronga Zvirongwa | TMflow, chati yekuyerera yakavakirwa | |
| Chitupa | CE, SEMI S2 (Sarudzo) | |
| Kufungidzira neKuona*(1) | ||
| Basa reAI | Kupatsanura, Kuona Zvinhu, Kupatsanura, Kuona Zvisina Kunaka, AI OCR | |
| Kushandiswa | Kuisa Positioning, 1D/2D Barcode Reading, OCR, Kuona Zvikanganiso, Kuyera, Kutarisa Kuungana | |
| Kururama Kwekuisa Nzvimbo | Nzvimbo ye2D: 0.1mm*(2) | |
| Ziso riri muruoko (rakavakwa mukati) | Carmera yemavara inotarisisa otomatiki ine resolution ye5M, Kureba kwekushanda 100mm ~ ∞ | |
| Ziso neRuoko (Sarudzo) | Tsigira makamera epamusoro e2xGigE 2D kana 1xGigE 2D Camera +1x3D Camera*(3) | |
| *(1)Hapana maoko erobhoti akavakirwa mukati ekuona TM12X, TM14X, TM16X, TM20X anowanikwawo. *(2)Data riri mutafura iyi rinoyerwa neTM laboratory uye daro rekushanda i100mm. Zvinofanira kucherechedzwa kuti mumashandisirwo anoitwa, kukosha kwakakodzera kunogona kusiyana nekuda kwezvinhu zvakaita senzvimbo yechiedza, hunhu hwechinhu, uye nzira dzekuronga kuona dzichakanganisa shanduko mukunyatsorongeka. *(3)Tarisa webhusaiti yepamutemo yeTM Plug & Play kuti uwane makamera anoenderana neTM Robot. | ||
Bhizinesi Redu


Zvikamu zvezvigadzirwa
-

Roboti reScara rine Axis 4 rine Suction Gripper yePikicha...
-
6 Axis Short Arm Range Handling Robot Industria ...
-

Tefude Yakachipa Yakagadzirirwa Robotic Arm Spider R ...
-
Muchina weMaindasitiri weRobhoti Ruoko rwe4 Axis Manipulator ...
-

Robhoti Rinoshanda Pamwe Chete (Erc 612m/Erc 612) Six Degr...
-
Kuwedera Kwemagetsi Huazhongcnc kana Hnc Hsr Small 6 ...