Ruoko rweRobhoti rweAxis 6 rweMari neMegmeet Ehave Cm350 Power Source
Ruoko rweRobhoti rweAxis 6 rweMari neMegmeet Ehave Cm350 Power Source
Chikamu Chikuru
Ruoko rwerobhoti remuindasitiri / Ruoko rwerobhoti rinoshanda pamwe chete / Chigadziko chemagetsi / Actuator yakangwara / Mhinduro dzeAutomation
Kushandiswa
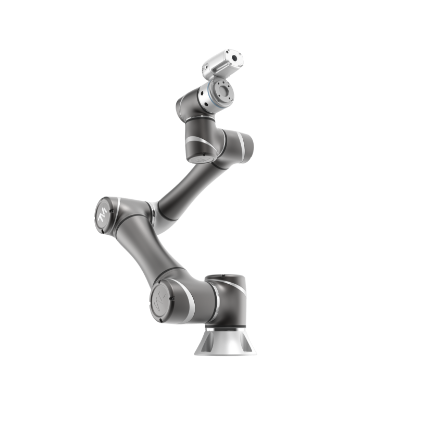
Iyo TM5-900 ine kugona "kuona" nepfungwa yakabatana inobata mabasa ekugadzira otomatiki uye ekuongorora nekuchinjika kwakanyanya. Robhoti redu rekushandira pamwe rinogona kushanda nevanhu uye kugovera mabasa akafanana, pasina kukanganisa kugona kana kuchengetedzeka. Inogona kupa mwero wepamusoro wekururama uye kushanda zvakanaka uku iri munzvimbo imwe chete yebasa. Iyo TM5-900 yakakodzera maindasitiri emagetsi, mota, uye chikafu.
Nehurongwa hwekuona hunotungamira mukirasi, tekinoroji yepamusoro yeAI, kuchengetedzeka kwakakwana, uye kushanda kuri nyore, AI Cobot ichaendesa bhizinesi rako mberi kupfuura kare. Endesa otomatiki padanho rinotevera nekuwedzera kugona, kuvandudza mhando, uye kuderedza mitengo.
Tichisuma ruoko rwedu rwe robhoti rwekubatana rwekutakura marobhoti rwe6-axis pamwe chete rwekuongorora kubatanidzwa kwemarobhoti, rwuri kuwedzera kwazvino kumhuri yedu yemaoko emarobhoti eindasitiri. Ruoko urwu rwerobhoti rwemazuva ano rwakagadzirirwa kushandura maitiro ekugadzira nekugadzira, zvichipa kururama uye kushanda zvakanaka kwakasiyana-siyana mumhando dzakasiyana dzemashandisirwo.
Ruoko rwerobhoti rwekubatana rwe6-axis collaborated robot transport grinding assembly rwekuongorora grinding assembly runoshandisa tekinoroji yepamusoro yerobhoti yekubatana kuti igone kushanda pamwe chete pakati pevashandi vevanhu nemasystems otomatiki. Ruoko urwu rwerobhoti rwekubatana rwakashongedzwa nemaseko matanhatu ekufamba, zvichibvumira kufamba kwakasiyana-siyana uye kushanduka-shanduka pakuita mabasa akasiyana-siyana. Ingave kutakura zvinhu, kukuya kana kupukuta nzvimbo, kana kuongorora mitsetse yekubatanidza, ruoko urwu rwerobhoti runogona kubata zvese zviri nyore.
Chimwe chezvinhu zvikuru zveruoko urwu rwemarobhoti emuindasitiri kugona kwarwo kuita mabasa akaoma uye akanyatsorongeka. Nemasensa arwo epamusoro uye sisitimu yekudzora yakangwara, ruoko rwerobhoti runogona kugara ruchipa mhedzisiro yepamusoro, kuderedza mhedzisiro yekukanganisa uye kuwedzera kugona kwese.
Chinoita kuti ruoko urwu rwerobhoti rinoshanda pamwe chete rive rakasiyana nemamwe kugona kwaro kubatanidzwa zvakanaka mumitsetse yekugadzira iripo. Nekugadzirwa kwaro kudiki uye interface iri nyore kushandisa, chishandiso che6-axis collaborated robot transport grinding assembly inspection collaborated manipulator chinogona kubatanidzwa nyore nyore munzvimbo ipi neipi yekugadzira, zvichideredza nguva yekushanda uye kuwedzera kushanda zvakanaka.
Pamusoro pezvo, ruoko urwu rwemarobhoti emuindasitiri rwakagadzirwa nepfungwa dzekuchengetedza. Rwakashongedzerwa nezvinhu zvekuchengetedza zvepamusoro, zvinosanganisira kuona tsaona uye kudzima otomatiki, zvichiita kuti vanhu nemidziyo vashande zvakanaka.
Muchidimbu, ruoko rwerobhoti rwekubatana rwe6-axis collaborated robot transport grinding assembly inspection collaborated robot arm runochinja zvikuru muindasitiri otomatiki, ruchipa kunyatsojeka, kushanda zvakanaka uye kuchengetedzeka kusingaenzaniswi. Kunyangwe uchida kugadzirisa maitiro ako ekugadzira, kuvandudza mhando yechigadzirwa, kana kuwedzera huwandu hwese hwezvinhu, ruoko urwu rwerobhoti ndiyo mhinduro yakakwana kune zvaunoda kugadzira. Nakidzwa neramangwana re otomatiki neruoko rwedu rwerobhoti rwemazuva ano.
Zvinhu zvirimo
NGWARUKA
Cobot yako inodzivirira ramangwana neAI
• Kuongorora kwemaziso otomatiki (AOI)
• Kuvimbisa mhando uye kugara kwenguva dzose
• Wedzera kushanda zvakanaka kwekugadzira
• Deredza mari yekushandisa
ZVIRI NYORE
Hapana ruzivo runodiwa
• Graphical interface yekuronga mapurogiramu zviri nyore
• Mafambiro ekugadzirisa akatarisana nemaitiro
• Kutungamira nemaoko kuri nyore pakudzidzisa mabasa
• Kugadzirisa zvinoonekwa nekukurumidza nebhodhi rekugadzirisa
YAKACHENGETEDZWA
Kuchengetedzwa pamwe chete ndiko kwatinonyanya kukoshesa
• Inotevedzera ISO 10218-1:2011 & ISO/TS 15066:2016
• Kuonekwa kwegonyeti nekumira kwekukurumidzira
• Chengetedza mari nenzvimbo yekudzivirira zvipingamupinyi nefenzi
• Gadza miganho yekumhanya munzvimbo yebasa yekushandira pamwe chete
Makobhoti anoshandisa AI anoziva kuvapo uye kurongeka kwenzvimbo yavo nezvikamu zvavo kuti vaite mabasa ekuona nekutarisa zvinhu. Shandisa AI mumutsara wekugadzira pasina matambudziko uye kuwedzera kugona, kuderedza mari, uye kupfupisa nguva yekutenderera. Chiono cheAI chinogonawo kuverenga mhedzisiro kubva kumichina kana michina yekuedza uye kuita sarudzo dzakakodzera zvinoenderana.
Kunze kwekuvandudza maitiro ekugadzira otomatiki, kambani inoshanda neAI inogona kuteedzera, kuongorora, uye kubatanidza data panguva yekugadzira kudzivirira zvikanganiso uye kuvandudza mhando yechigadzirwa. Shandisa tekinoroji yako yeAI zviri nyore.
Marobhoti edu anoshanda pamwe chete ane sisitimu yekuona yakabatana, ichipa macobot kugona kuona nharaunda yawo izvo zvinovandudza zvakanyanya kugona kwecobot. Kuona marobhoti kana kugona "kuona" uye kududzira data rekuona kuita mirairo ndeimwe yezvinhu zvinoita kuti tive vakanakisisa. Inoshandura mutambo pakuita mabasa nemazvo munzvimbo dzebasa dzinochinja-chinja, zvichiita kuti mashandiro afambe zvakanaka, uye maitiro e otomatiki ave nani.
Yakagadzirwa nepfungwa dzevashandisi vekutanga, ruzivo rwemapurogiramu harusi chinhu chinodiwa kuti utange neAI Cobot. Kufamba kwekushandisa mafambiro ekudzvanya nekudhonza uchishandisa software yedu yekuyerera kwepurogiramu kunoderedza kuoma. Tekinoroji yedu ine patent inobvumira vashandisi vasina ruzivo rwekunyora makodhi kuronga purojekiti kwemaminitsi mashanu.
Ma sensor ekuchengetedza anomisa AI Cobot kana yaonekwa kuti yabatwa, zvichideredza kukuvara kunogona kuitika panzvimbo isina kumanikidzwa uye yakachengeteka. Unogonawo kugadzirisa miganho yekumhanya kwerobhoti kuitira kuti ikwanise kushandiswa munzvimbo dzakasiyana-siyana dziri pedyo nevashandi vako.
Zvigadzirwa Zvakabatana



Chiratidzo cheSpecial
| Muenzaniso | TM5-900 | |
| Huremu | 22.6KG | |
| Mutoro Mukuru | 4KG | |
| Svika | 900mm | |
| Nzvimbo dzeJoint | J1,J6 | ±270° |
| J2,J4,J5 | ±180° | |
| J3 | ±155° | |
| Kumhanya | J1, J2, J3 | 180°/s |
| J4, J5, J6 | 225°/s | |
| Kumhanya Kwakajairika | 1.4m/s | |
| Kumhanya Kwakanyanya | 4m/s | |
| Kudzokorora | ± 0.05mm | |
| Mwero werusununguko | Majoini matanhatu ekutenderera | |
| Ini/O | Bhokisi rekudzora | Kupinda kwedhijitari:16 Kubuda kwedhijitari: 16 Kupinda kweanalogi:2 Kubuda kweanalog:1 |
| Chishandiso Chinobatanidza. | Kupinda kwedhijitari: 4 Kubuda kwedhijitari: 4 Kupinda kweanalogi:1 Kubuda kweanalog:0 | |
| Simba reI/O | 24V 2.0A yebhokisi rekudzora uye 24V 1.5A yemudziyo | |
| Kupatsanurana kweIP | IP54 (Robot Arm); IP32 (Bhokisi Rekudzora) | |
| Kushandiswa kweSimba | Zvakajairika 220 watts | |
| Tembiricha | Robhoti inogona kushanda munzvimbo inodziya tembiricha iri pakati pe0-50℃ | |
| Kuchena | ISO Kirasi 3 | |
| Magetsi | 100-240 VAC, 50-60Hz | |
| I/O Interface | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Kutaurirana | RS232, Ethemet, Modbus TCP/RTU (tenzi & muranda), PROFINET (Sarudzo), EtherNet/IP (Sarudzo) | |
| Nzvimbo Yekuronga Zvirongwa | TMflow, chati yekuyerera yakavakirwa | |
| Chitupa | CE, SEMI S2 (Sarudzo) | |
| AI & Chiono*(1) | ||
| Basa reAI | Kupatsanura, Kuona Zvinhu, Kupatsanura, Kuona Zvisina Kunaka, AI OCR | |
| Kushandiswa | Kuisa Positioning, 1D/2D Barcode Reading, OCR, Kuona Zvikanganiso, Kuyera, Kutarisa Kuungana | |
| Kururama Kwekuisa Nzvimbo | Nzvimbo ye2D: 0.1mm*(2) | |
| Ziso riri muruoko (rakavakwa mukati) | Carmera yemavara inotarisisa otomatiki ine resolution ye5M, Kureba kwekushanda 100mm ~ ∞ | |
| Ziso neRuoko (Sarudzo) | Tsigira makamera epamusoro e2xGigE 2D kana 1xGigE 2D Camera +1x3D Camera*(3) | |
| *(1)Hapana maoko erobhoti akavakirwa mukati ekuona TM5X-700, TM5X-900 anowanikwawo. *(2)Data riri mutafura iyi rinoyerwa neTM laboratory uye daro rekushanda i100mm. Zvinofanira kucherechedzwa kuti mumashandisirwo anoitwa, kukosha kwakakodzera kunogona kusiyana nekuda kwezvinhu zvakaita senzvimbo yechiedza, hunhu hwechinhu, uye nzira dzekuronga kuona dzichakanganisa shanduko mukunyatsorongeka. *(3)Tarisa webhusaiti yepamutemo yeTM Plug & Play kuti uwane makamera anoenderana neTM Robot. | ||
Bhizinesi Redu


Zvikamu zvezvigadzirwa
-

6 Axis Robotic Arm 10kg Payload 1350mm Kubata ...
-

Xyz Stage 3 Axis Table Industrial Robot Arm
-

Marobhoti Anoshanda Pamwe Chete Emhando Yakanaka 6 Axis 5k ...
-
Robhoti yeSzgh Industrial Six-Axis Welding Arm Robot ...
-
Ruoko rweRobhoti Runoshanda Pamwe Chete rweKurodha ...
-

4 Axis Delta Robot Automatic Parallel Robot Ind...