HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-26 Parallel Electric Gripper



Chikamu Chikuru
Ruoko rwerobhoti remuindasitiri / Ruoko rwerobhoti rinoshanda pamwe chete / Chigadziko chemagetsi / Actuator yakangwara / Mhinduro dzeAutomation
Kushandiswa
Marobhoti eSCIC Z-EFG akatevedzana ane madiki ane servo system yakavakirwa mukati, izvo zvinoita kuti zvikwanisike kudzora kumhanya, nzvimbo, uye simba rekusunga. Sisitimu yeSCIC yekubata otomatiki ichakubatsira kuvhura mikana mitsva yekushanda otomatiki mabasa ausina kumbofunga kuti anogona kuitwa.

Chinhu
·Kuonekwa kwekudonha kwegripper, basa rekuburitsa nzvimbo
· Simba, nzvimbo uye kumhanya zvinogona kudzorwa nemazvo kuburikidza neModbus
·Hupenyu hurefu: makumi emamiriyoni emadenderedzwa, anopfuura nzara dzemhepo
· Chinodzora chakavakwa mukati: nzvimbo diki, nyore kubatanidzwa
·Modhi yekudzora: 485 (Modbus RTU), I/O
Simba rekumanikidza, kumhanya kunogona kurongeka kudzora neModbus
Kushandiswa Kwakawanda
Iine clamping drop detection uye district output
Kudzora Kwakarurama
Simba rekusunga, bit, uye kumhanya zvinogona kudzorwa neModbus
Nguva Yehupenyu Hurefu
Mamiriyoni gumi anotenderera, achipfuura nepachibati chemhepo
Mutongi Akavakirwa-mukati
Iine nzvimbo diki, iri nyore kubatanidza.
Kukurumidza Kuita Chinhu
Nguva pfupi yekurohwa kamwe chete imasekondi 0.25 chete
Kubatanidza Nyoro
Inogona kubata zvinhu zvisina kusimba, zvakaita sezai, kapu yegirazi, nezvimwewo.




Chiratidzo cheSpecial
Z-EFG-26 igripper yemagetsi ine minwe miviri yakafanana, diki asi ine simba rekubata zvinhu zvakawanda zvakapfava zvakaita semazai, mapaipi, zvikamu zvemagetsi, nezvimwewo.
● Chigadziko chemagetsi cheZ-EFG-26 chine chinodzora chakavakirwa mukati.
●Simba rayo rekurova uye rekubata zvinogadziriswa.
●Materminal anogona kutsiviwa kuti aenderane nezvinodiwa zvakasiyana-siyana.
●Nyora zvinhu zvisina kusimba uye zvinorema, zvakaita semazai, machubhu ekuyedza, mhete, nezvimwewo.
●Yakakodzera nzvimbo dzisina mhepo (senge marabhoritari, uye zvipatara).
| Nhamba yeModheru Z-EFG-26 | Maparamita |
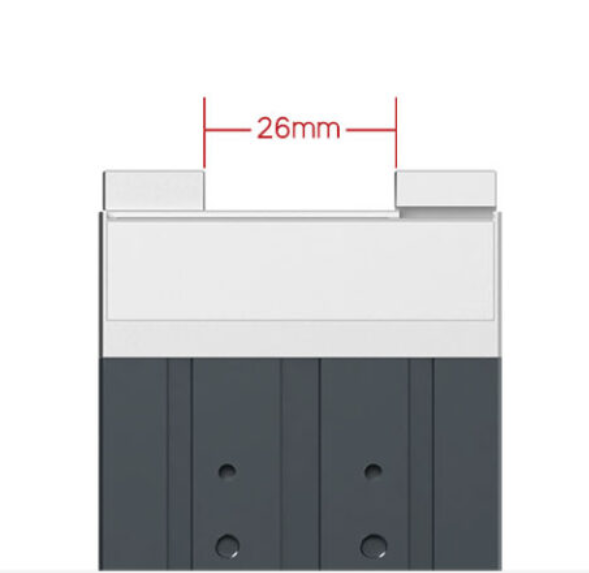
| Huwandu sitiroko | 26mm |
| Simba rinobata | 6~15N |
| Kudzokorora | ± 0.02mm |
| Huremu hwekubata hunokurudzirwa | 0.3kg yepamusoro |
| Kutapurirana maitiro | Giya regiya + gwara remuchinjikwa rinotenderera |
| Kuzadzazve mafuta ezvikamu zvinofamba | Mwedzi mitanhatu yega yega kana mafambiro emamiriyoni imwe / nguva |
| Nguva yekufamba kwestroke nenzira imwe chete | 0.25s |
| Tembiricha yekushanda | 5-55℃ |
| Rudzi rwehunyoro hwekushanda | RH35-80()Hapana chando) |
| Maitiro ekufamba | Minwe miviri inofamba yakatwasuka |
| Kudzora sitiroko | Inogona kugadziriswa |
| Kugadziriswa kwesimba rekusimbisa | Inogona kugadziriswa |
| Huremu | 0.45kg |
| Zviyero()L*W*H) | 55*26*97mm |
| Kuiswa kwemutongi | Yakavakirwa mukati |
| Simba | 10W |
| Rudzi rwemota | DC isina mabhurashi |
| Nguva Yepamusoro Yemagetsi | 1A |
| Vheji yakayerwa | 24V |
| Nguva yakamira | 0.4A |
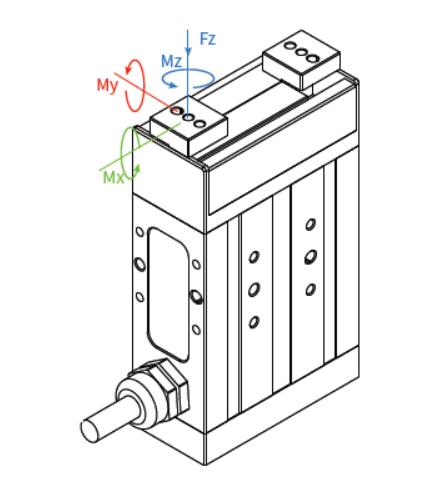
| Mutoro unobvumidzwa unomira munzira yakatwasuka | |
| Fz: | 250N |
| Torque inobvumidzwa | |
| Mx: | 2.4 Nm |
| Zvangu: | 2.6 Nm |
| Mz: | 2 Nm |
Kururama Kwekudzora Simba Rakarurama Kudzokorora

Chigadziko chemagetsi chakashandisa dhizaini yekutumira uye kuverenga kwekutyaira kuti chidzore, kurova kwacho kwese i26mm, simba rekubatanidza i6-15N, simba rekubatanidza uye rekubatanidza rinogona kugadziriswa, uye kugona kwayo kudzokororwa i±0.02mm.
Kukurumidza Kuita, Kugadzikana Kwakawanda

Nguva pfupi yekurova kamwe chete imasekondi 0.25 chete, inogona kusangana nezvinodiwa nekukurumidza uye zvakagadzikana zvekusunga tambo yekugadzira.
Chidzitiro Chidiki, Chiri Nyore Kubatanidza

Saizi yeZ-EFG-26 iL55*W26*H97mm, chimiro chayo chidiki, inotsigira nzira dzinopfuura shanu dzekuisa dzinochinjika, yakavakirwa mukati mecontroller, ine nzvimbo diki, inogona nyore kubata mabasa akawanda ekubatanidza clamping.

Kubatanidza Kutyaira uye Kudzora Kunorovera Zvinyoro

Chikamu chemuswe chegripper yemagetsi chinogona kuchinjwa zviri nyore, huremu hwacho hwekusunga i300g, vatengi vanogona kugadzira chikamu chemuswe chegripper kuti chisangane nezvinhu zvavo zvekusunga, kuitira kuti gripper yemagetsi ikwanise kupedzisa mabasa ekusunga zvakanyanya.
Maitiro Ekudzora Vazhinji, Ari Nyore Kushanda

Magadzirirwo egripper yeZ-EFG-26 ari nyore, ine nzira yekudzora yakawanda: 485 (Modbus RTU), Pulse, I/O, inoenderana nePLC main control system.

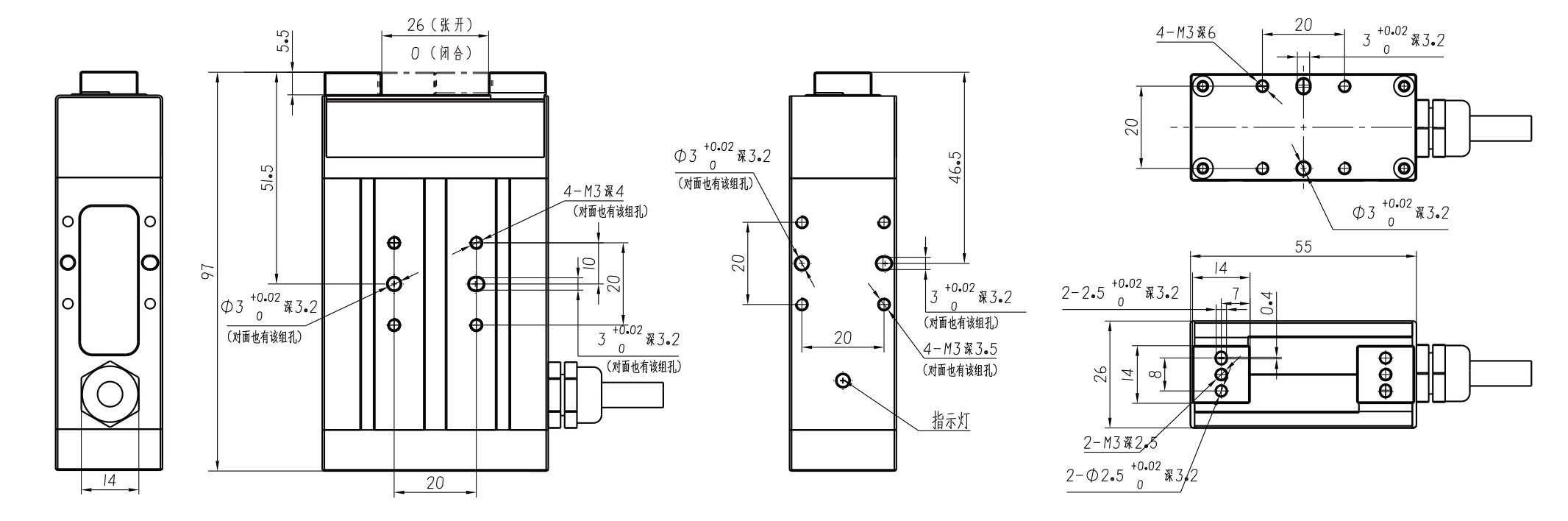
Dhizaini yekuisa dhayagiramu
Bhizinesi Redu


Zvikamu zvezvigadzirwa
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER PGS SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-C6...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-20P Para...
-

GRIPPER MODULE SERIES – FPT T-minwe miviri ...