HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-20 Parallel Electric Gripper


Chikamu Chikuru
Ruoko rwerobhoti remuindasitiri / Ruoko rwerobhoti rinoshanda pamwe chete / Chigadziko chemagetsi / Actuator yakangwara / Mhinduro dzeAutomation
Kushandiswa
Marobhoti eSCIC Z-EFG akatevedzana ane madiki ane servo system yakavakirwa mukati, izvo zvinoita kuti zvikwanisike kudzora kumhanya, nzvimbo, uye simba rekusunga. Sisitimu yeSCIC yekubata otomatiki ichakubatsira kuvhura mikana mitsva yekushanda otomatiki mabasa ausina kumbofunga kuti anogona kuitwa.

Chinhu

· Mutongi akavakirwa mukati
· Kurovera kunogadziriswa uye simba rekubata
· Mugumo unogona kutsiviwa kuti ugadzirise zvinodiwa zvakasiyana-siyana
·Kutora zvinhu zvisina kusimba uye zvinorema zvakaita semazai,machubhu ekuyedza, mhete, nezvimwewo.
·Nyorerai nzvimbo dzisina mhepo (semuenzaniso, nzvimbo yekuchengetera varwere, chipatara)
Kururama Kwekudzora, Kubatanidza Munzvimbo Diki Kukurumidza uye Kwakagadzikana Kubatanidza
Simba Guru reKubata
Kurovera kwese kwese i20mm, simba rekusunga i80N.
Kururama Kwekudzora
Kudzokororwa: ± 0.02mm
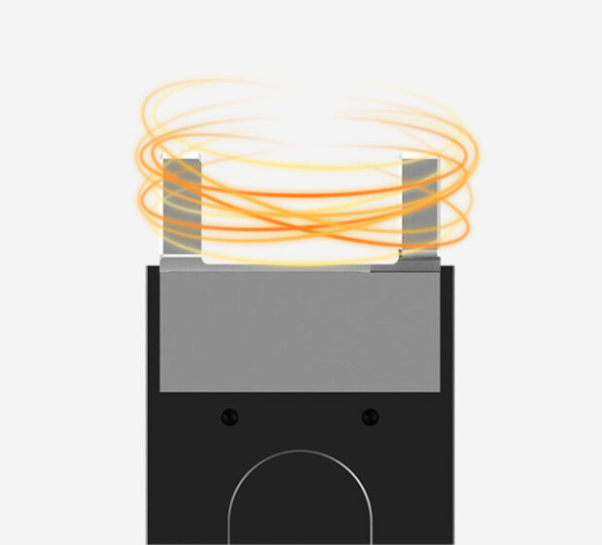
Nguva Yehupenyu Hurefu
Makumi emamiriyoni ekutenderera, kupfuura gripper yemhepo
Mutongi Akavakirwa mukati
Nzvimbo diki inotora, iri nyore kubatanidza.
Maitiro Ekudzora
Pulse, I/O controllers yesarudzo
Kubatanidza Nyoro
Inogona kuvharira zvinhu zvisina kusimba




Chiratidzo cheSpecial
| Nhamba yeModheru Z-EFG-20 | Maparamita |
| Huwandu sitiroko | 20mm |
| Simba rinobata | 30~80N |
| Kudzokorora | ± 0.02mm |
| Huremu hwekubata hunokurudzirwa | 0.8kg |
| Kutapurirana maitiro | Giya regiya + gwara remuchinjikwa rinotenderera |
| Kuzadzazve mafuta ezvikamu zvinofamba | Mwedzi mitanhatu yega yega kana mafambiro emamiriyoni imwe / nguva |
| Nguva yekufamba kwestroke nenzira imwe chete | 0.45s |
| Tembiricha yekushanda | 5-55℃ |
| Rudzi rwehunyoro hwekushanda | RH35-80()Hapana chando) |
| Maitiro ekufamba | Minwe miviri inofamba yakatwasuka |
| Kudzora sitiroko | Inogona kugadziriswa |
| Kugadziriswa kwesimba rekusimbisa | Inogona kugadziriswa |
| Huremu | 0.458kg |
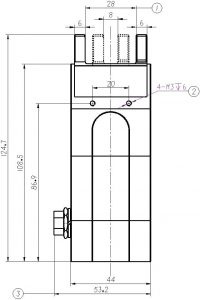
| Zviyero()L*W*H) | 44*30*124.7mm |
| Kuiswa kwemutongi | Yakavakirwa mukati |
| Simba | 5W |
| Rudzi rwemota | DC isina mabhurashi |
| Nguva Yepamusoro Yemagetsi | 1A |
| Vheji yakayerwa | 24V |
| Nguva yakamira | 0.2A |
| Inodzivirira kukanganiswa / inodzivirira kudedera | 98m/s |
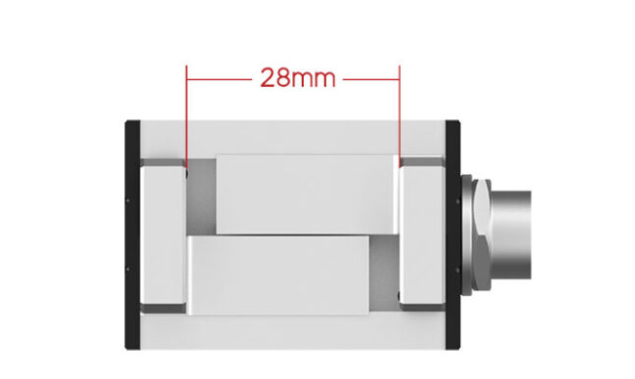
| Dhayamita yemota | 28mm |
* Simba rekubata reZ-EFG-20: Simba rekubata rinogona kugadziriswa nekuwedzera chinhu chinodzorwa chekuchinja kumberi kwechigadzirwa, icho chinowanikwa zvichienderana nekongiri inoenderana yekuchinja uye simba.
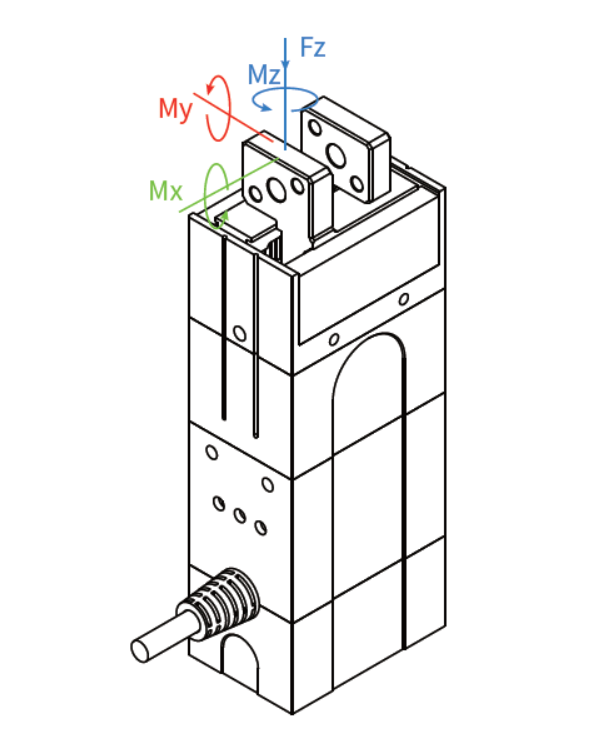
| Mutoro unobvumidzwa unomira munzira yakatwasuka | |
| Fz: | 150N |
| Torque inobvumidzwa | |
| Mx: | 2.1 Nm |
| Zvangu: | 2.34 Nm |
| Mz: | 2 Nm |
Simba Guru reKubata, Kururama Kwesimba Kudzora

Chigadziko chemagetsi chinotora dhizaini yakakosha yekutumira uye muripo wekuverenga kutyaira, simba rayo rekusunga rinogadziriswa 80N nguva dzose, kurohwa kwese kuri 20mm, kudzokorora kwaro kuri ± 0.02mm.
Mota yekufamba uye Stroke Inogadziriswa
Kufamba kwegripper yemagetsi ndekwekufamba kwakafanana kweminwe miviri, nguva yayo pfupi yekurovera kamwe chete imasekondi 0.45 chete, huremu hwekusunga ≤0.8Kg, inogona kusangana nezvinodiwa zvekusunga zvakagadzikana zvemutsara wekugadzira.
Chimiro Chidiki, Chinochinjika Kuisa.

Saizi yeZ-EFG-20 iL40*W30*H124.7mm, chimiro chayo chakamanikana, inotsigira nzira dzinopfuura shanu dzekuisa, controller yayo yakavakirwa mukati, inotora nzvimbo diki, iyo inogona kuve nyore kuita mabasa akasiyana-siyana ekubatanidza.


Kutyaira uye Kudzora Kwakabatanidzwa, Kubatanidza Zvinyoro

Muswe weZ-EFG-20 unogona kuchinjwa zviri nyore, vatengi vanogona kubatanidza zvinhu zvavanoda, kugadzira muswe, uye kuchengetedza chibatiso chemagetsi kuti chipedze mabasa ekubatanidza zvakanyanya.
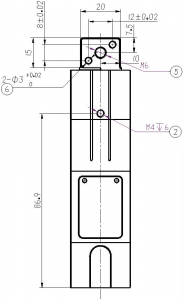
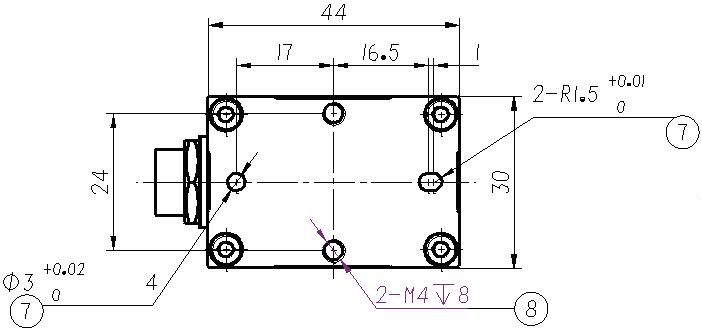
Dhizaini yekuisa dhayagiramu
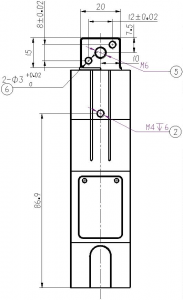
① Kufamba kweminwe inobata
② Nzvimbo yekugadzika divi (gomba rakarukwa)
③ Nzvimbo yekuisa waya yesokisi yendege
④ Nzvimbo yesimba rekugadzirisa gripper (kuruboshwe) uye chiedza chechiratidzo (kurudyi)
⑤ Nzvimbo yekuisa gripper (gomba rakarukwa)
⑥ Nzvimbo yekuisa gripper (buri repin)
⑦ Nzvimbo yekugadzika pasi (buri repini)
⑧ Nzvimbo yekugadzika pasi ((gomba rakarukwa)
Bhizinesi Redu


Zvikamu zvezvigadzirwa
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-C5...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...