HITBOT ELECTRIC GRIPPER SERIES – Z-ECG-10 Chigadziko chemagetsi chine minwe mitatu




Chikamu Chikuru
Ruoko rwerobhoti remuindasitiri / Ruoko rwerobhoti rinoshanda pamwe chete / Chigadziko chemagetsi / Actuator yakangwara / Mhinduro dzeAutomation
Kushandiswa

Chinhu

·Kuonekwa kwekudonhedza kweClamp, basa rekubuda kwenzvimbo
·Simba, nzvimbo, kumhanya kunodzorwa, kutonga kwakarurama kuburikidza neModbus
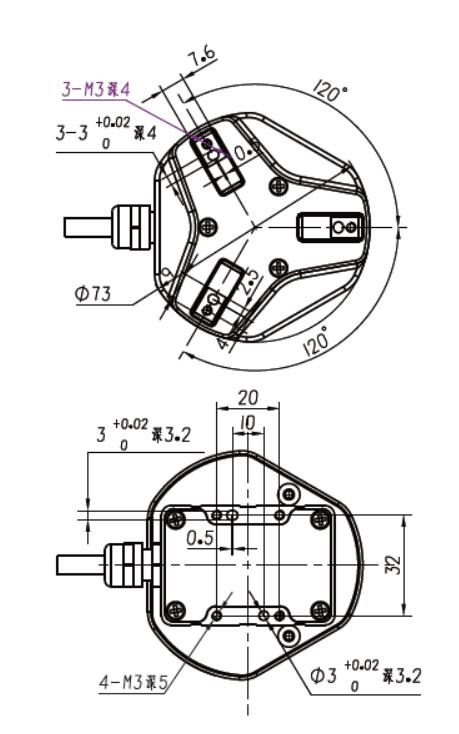
·Chibatiso chepakati cheminwe mitatu
·Yakavakirwa-mukati controller: diki footprint, nyore kubatanidzwa
·Maitiro ekudzora: 485 (Modbus RTU), I/O
Chinobatirira Magetsi Chine Minwe Mitatu Chiri Nyore Kubatanidza Zvinhu zveSilinda
Kushanda Kwakanyanya
Simba reKubata: 3-10N,
Simba Rakawanda
Kururama Kwekudzora
Inogona kudzorwa neModbus
Kunzwisisa Mhinduro
Iine basa rekuti pf clamping drop detection regional output.
Mutongi Akavakirwa-mukati
Chifukidziro chidiki chenzvimbo, chiri nyore kubatanidza.
Maitiro Ekudzora Akawanda
Rutsigiro 485 (Modbus) I/O
Chinobata Minwe Mitatu
Chinobatisa neminwe mitatu, chakakodzera zviitiko zvakasiyana-siyana




Chiratidzo cheSpecial
| Nhamba yeModheru Z-ECG-10 | Maparamita |
| Huwandu sitiroko | 10mm |
| Simba rinobata | 3-10N |
| Kudzokorora | ± 0.03mm |
| Huremu hwekubata hunokurudzirwa | 0.2kg yepamusoro |
| Kutapurirana maitiro | Rack nePinion + Ball Guide Rail |
| Kuzadzazve mafuta ezvikamu zvinofamba | Mwedzi mitanhatu yega yega kana mafambiro emamiriyoni imwe / nguva |
| Nguva yekufamba kwestroke nenzira imwe chete | 0.3s |
| Tembiricha yekushanda | 5-55℃ |
| Rudzi rwehunyoro hwekushanda | RH35-80()Hapana chando) |
| Kutsvuka kweganda | Rutivi rumwe chete: 0.2mm |
| Kudzora sitiroko | Inogona kugadziriswa |
| Kugadziriswa kwesimba rekusimbisa | Inogona kugadziriswa |
| Huremu | 0.5kg |
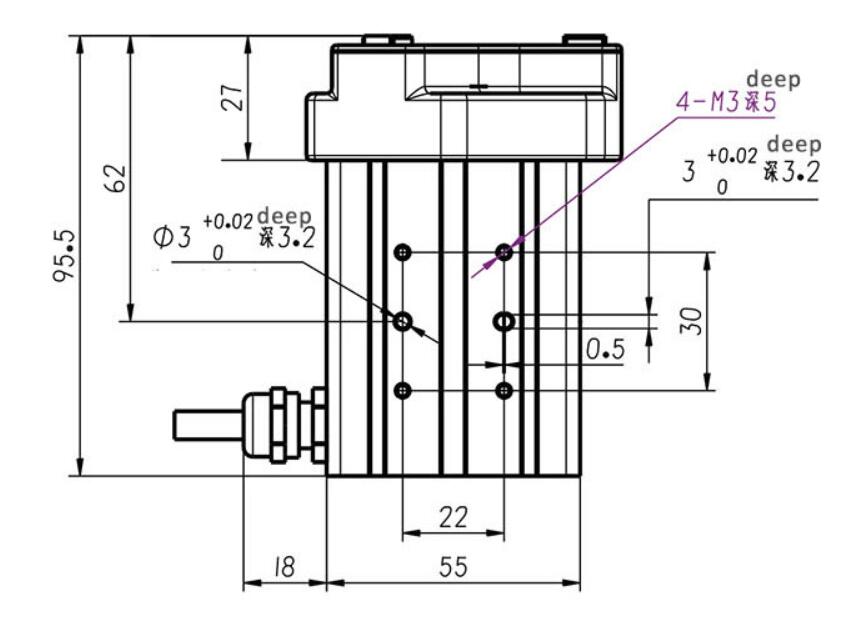
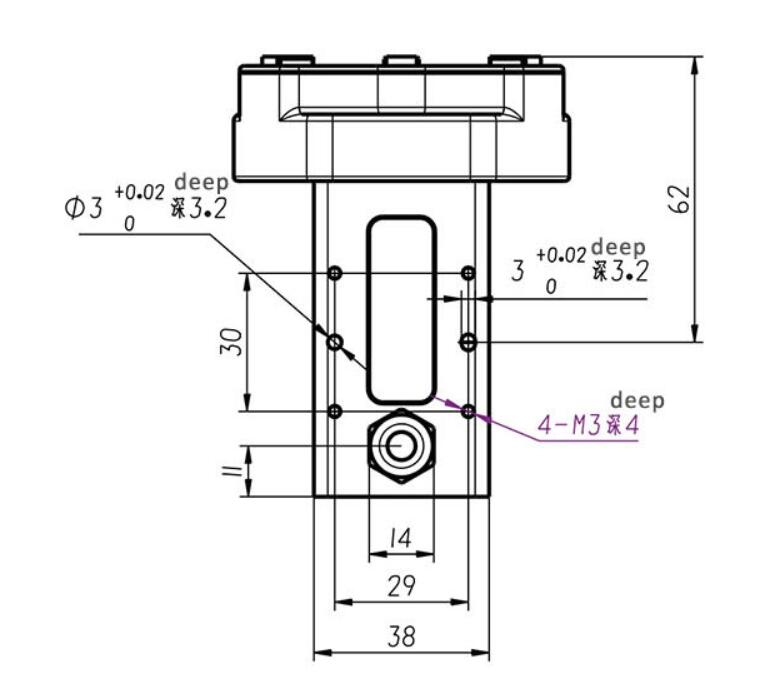
| Zviyero()L*W*H) | 73*73*95.5mm |
| Giredhi reDziviriro | IP20 |
| Rudzi rwemota | Servo Mota yeMagetsi |
| Nguva Yepamusoro Yemagetsi | 0.6A |
| Vheji yakayerwa | 24V ±10% |
| Nguva yakamira | 0.3A |
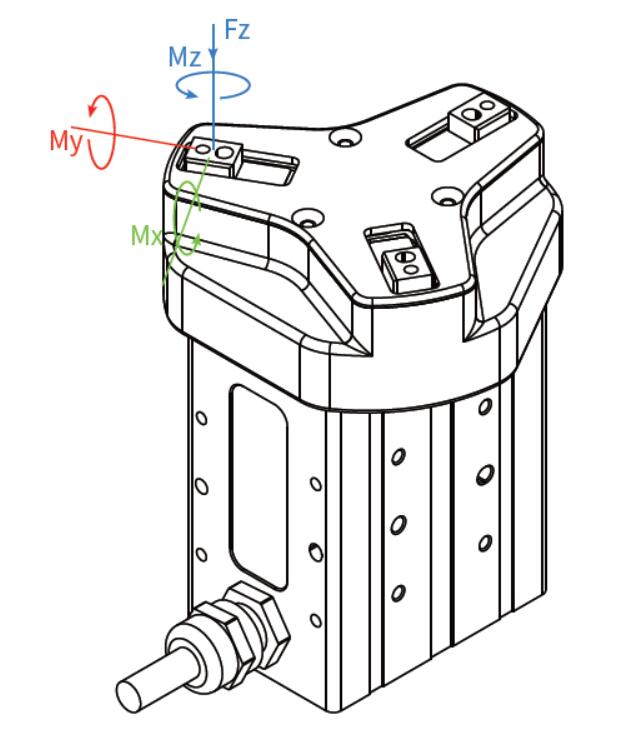
| Mutoro unobvumidzwa unomira munzira yakatwasuka | |
| Fz: | 70N |
| Torque inobvumidzwa | |
| Mx: | 0.64 Nm |
| Zvangu: | 0.4 Nm |
| Mz: | 0.48 Nm |
Kurongeka kwePositioning, Gripper yeMinwe Mitatu
Z-ECG-10 ine minwe mitatu yemagetsi, inogona kudzokororwa ±0.03mm, ine minwe mitatu yekubata, uye ine basa rekuona madonhwe emagetsi, inoburitsa zvinhu zvemudunhu, izvo zvinogona kuva nani kubata zvinhu zvesilinda.


Mutongi Akavakirwa mukati, Kubatanidzwa Kwakanyanya
Dziviriro huru pakuiswa zvinhu zvakawanda ipapo ipapo, kuitira kuti gripper yemagetsi isamire kana mamwe mamiriro asina kujairika. Yakagadzirwa necontroller, simba, bit uye kumhanya zvinogona kudzorwa, inofukidza nzvimbo diki yebasa, iri nyore kubatanidza.
Mufananidzo Mudiki, Unochinjika Kuisa

Z-ECG-10 inofanira kushandisa rudzi rwekutumira rwe rack ne pinion + linear guide, saizi yayo iL73*W73*H109, huremu hwayo i0.65kg chete, chimiro chayo chakaoma, inotsigira marudzi ekuisa akawanda, zviri nyore kupedzisa mabasa akawanda ekubatanidza.


Kukurumidza Kuita, Kururama Kudzora Simba
Kurovera kupfupika kudiki i0.3s, simba rekusunga i3-10N, kurovera kwekusunga i10mm, huremu hunenge 0.2kg, izvo zvinogona kuita kuti clamp ive yakatwasuka zvakanyanya.
Maitiro Ekudzora Akawanda, Ari Nyore Kushanda

Z-ECG-10 inogona kudzorwa neModbus nenzira yakarurama, zviri nyore kuigovanisa, kuti ushandise kutaurirana kweDigital I/O, unongoda tambo imwe chete kuti ubatanidze ON/OFF, inoenderanawo nePLC main control system.

Nzvimbo Yekurodha yeGravity Offset
Bhizinesi Redu


Zvikamu zvezvigadzirwa
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-26 Paral...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-FS Colla...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES – Z-EFG-20 Paral...
-

DH MAROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...